Оценка поведенческих реакций у крупного рогатого скота

Дистанционный мониторинг поведения животных имеет большой потенциал для улучшения управления животноводством, однако требуются технологии, способные собирать данные с высокой частотой, и точные методы классификации данных. Существует возможность более глубокого понимания факторов, влияющих на выбор ресурсов, рост, размножение и выживаемость животных, а также стратегии их адаптации к окружающей среде за счет измерения поведения и местоположения в разное время и пространственных масштабах.
Мониторинг поведения в режиме, близком к реальному времени, может способствовать более точным и своевременным управленческим решениям, направленным на оптимизацию продуктивности животных, повышение их благополучия и снижение воздействия на окружающую среду.
В системах выпаса глобальные системы позиционирования (GPS) и датчики движения (например, акселерометры) могут использоваться для отслеживания поведения животных почти в режиме реального времени, если они интегрированы в сети беспроводных датчиков.
Однако проблема использования сенсорных данных заключается в том, чтобы автоматизировать дифференциацию поведенческих действий. Несколько методологий ранее использовались для классификации данных датчиков по поведенческим состояниям. Но эти методологии требуют набора обучающих данных (например, прямых наблюдений) в каждом эксперименте или состоянии и не учитывают различия между отдельными животными и устройствами. Методология, надежная для использования с данными, собранными с разных устройств, также уменьшит необходимость калибровки датчиков и подбора ошейников с одинаковым натяжением. Смешанные модели устраняют эти ограничения, позволяя классифицировать данные без учителя с использованием функций плотности вероятности.
Характеристика структуры поведения с использованием смешанных моделей в сочетании с наблюдениями в одном эксперименте позволяет оценить параметры, описывающие PDF, без необходимости прямого наблюдения в последующих экспериментах.
Для автоматизации дифференциации поведенческих действий на основе сенсорных данных возникает ряд проблем. Методы классификации данных датчиков по поведенческим состояниям требуют набора обучающих данных в каждом эксперименте или состоянии и не учитывают особенности отдельных животных и устройств.
Применение смешанных моделей для анализа структуры поведения в одном эксперименте позволяет оценить параметры, описывающие PDF, и использовать их для классификации и анализа в последующих экспериментах без необходимости прямого наблюдения. Это значительно повышает точность и эффективность процесса классификации.
Цель исследования — апробация методики, позволяющей оценить структуру электронных данных и классифицировать их по поведенческим параметрам, таким как поиск пищи, отдых, размышление, передвижение и «другое активное поведение», с использованием технологии GPS и данных датчика движения, полученных от специальных ошейников на бычках.
Материалы и методы исследования
Исследование было проведено в 2022 г. в ООО «Бородулинское». Здания коровников расположены в пос. Октябрьском Сысертского района Свердловской области (территория сельскохозяйственного предприятия ООО «Бородулинское»).
Исследование проводилось на ферме с молочным стадом в 700 голов, 614 из них — молочные (все — черно-пестрой породы). Форма содержания — привязная, средний удой — 8500 кг/год, средний дневной удой — 26 кг. Сохранность телят — 99%.
Методология включает два независимых испытания: первое — для разработки алгоритма классификации (4 группы по 11 бычков), второе — для его оценки (14 бычков). Каждый бычок был оснащен ошейником с трехосевым акселерометром (ФГБНУ ФНАЦ ВИМ, Россия), который собирал данные с частотой 4 и 10 Гц соответственно.
Поиск пищи, размышления, передвижение, отдых и «другое активное поведение» (которое включало царапание предметов, тряску головой и уход за собой) наблюдались и записывались непрерывно с точностью до 1 сек. у животных, носящих акселерометр на ошейнике. Данные акселерометра были объединены в 10-секундные интервалы через среднее значение, показывающее положение шеи и скорость движения, и стандартное отклонение (SD), показывающее уровень активности, а затем логарифмически преобразованы для анализа.
Уровень активности молочной коровы определялся с помощью характеристики активности, сочетающей ускорение и местоположение AC = (AV, DV), в которой AV отображало изменение ускорения при движении коровы, а DV — изменение положения коровы. Характеристика i-й активности за определенный период времени была описана следующим образом:

где: axi, ayi и azi — i-е значения ускорения поведения коровы по осям x, y, z соответственно; ax(i-1), ay(i-1) и az(i-1) — (i-1)-е ускорение поведения коровы по осям x, y, z соответственно; dxi и dyi выражают координаты x-го и yi-го смещения соответственно; dx(i-1)и dy(i-1)обозначают координаты x-го и y(i-1)-го смещения соответственно.
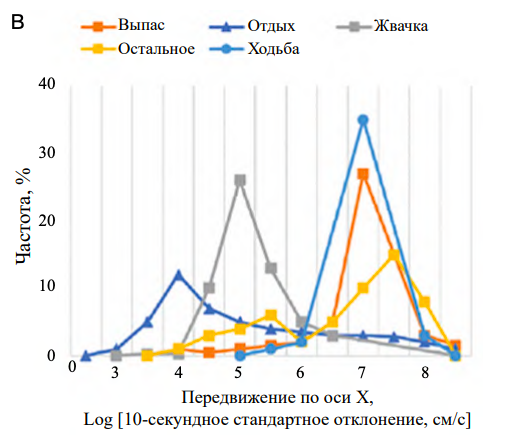
Гистограммы скорости движения показали три вида, а наблюдения — что эти виды представляют собой нормальное, медленное и быстрое поведение при перемещении. Гистограммы среднего значения по оси х акселерометра показали виды поведения, соответствующие положению «голова вниз» или «голова вверх». Гистограммы SD оси х акселерометра показали три вида поведения, представляющиеся с высоким, средним и низким уровнем активности.
Смешанные модели были приспособлены к данным, полученным от каждого животного в обоих испытаниях, для расчета пороговых значений, соответствующих переходу поведения между различными состояниями. Эти пороговые значения из трех сигнатур датчиков затем использовались в дереве решений для классификации всех 10-секундных данных, где поведение было неизвестно, в 5 взаимоисключающих поведениях.
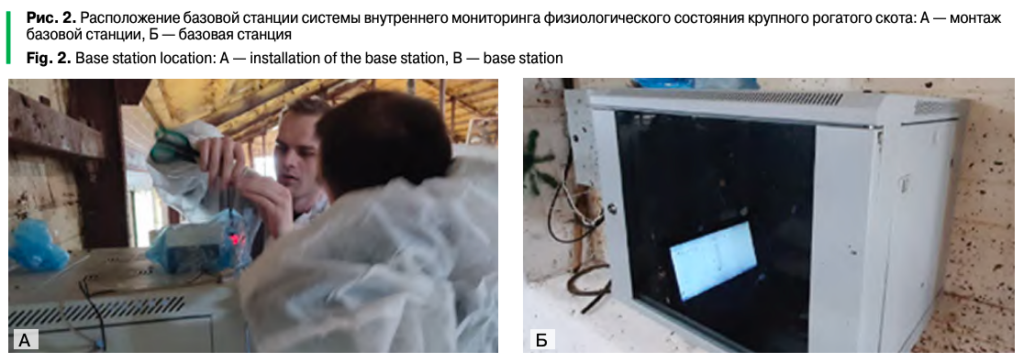
Перед началом исследования была установлена базовая станция системы внутреннего мониторинга физиологического состояния крупного рогатого скота, необходимая для работы устройств (ФГБНУ ФНАЦ ВИМ, Россия).
Схема расположения представлена на рисунке 1.
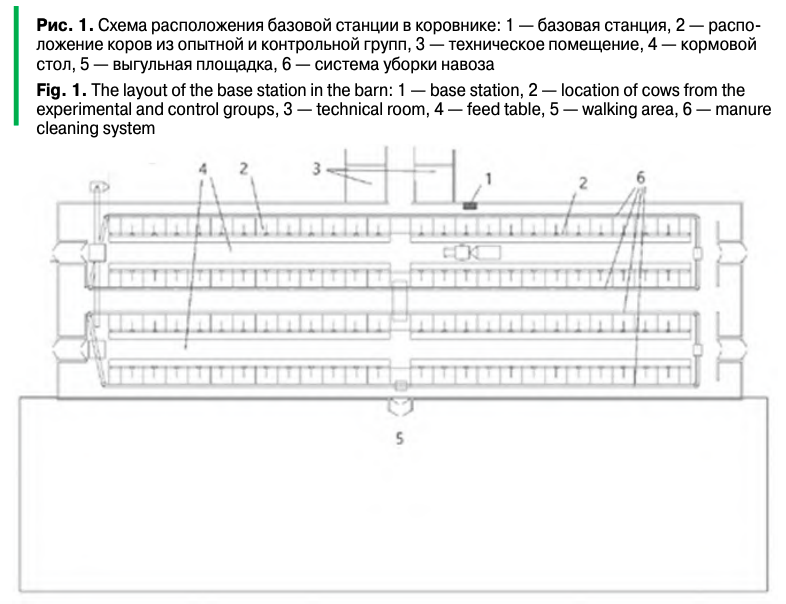
Монтаж базовой станции. Базовая станция была размещена в коровнике, рядом со входом в техническое помещение (рис. 2).
Методика сбора данных о поведении животного выглядела так:
1 Закрепление транспондера на шее коровы с помощью ремня.
2 Запись сигналов акселерометра в случае, когда корова:
2.1 находится в покое (стоит в стойле);
2.2 потребляет корм;
2.3 в движении (идет на прогулку).
3 Передача собранных данных на базовую станцию.
4 Корреляционный анализ Пирсона с помощью программы IBM SPSS Statistics (IBM, Армонк, США).
Результаты и обсуждение
Наблюдения начинались в день наложения ошейника. В ходе наблюдений были зарегистрированы пять взаимоисключающих действий (то есть животные могли выполнять только одно действие в зафиксированный промежуток времени): выпас, жвачка, отдых, передвижение и другие виды активной деятельности (к ним отнесли активные движения головой в положении стоя без движения тела вперед и без участия в выпасе).
Первоначально выпас с опущенной головой, рыскание и поиск пищи регистрировались отдельно, однако выпас занимал более 95% всех видов кормодобывания, и для простоты было решено объединить эти три действия в одно, называемое «выпас».
Жвачка определялась как в положении стоя, так и когда корова лежала на земле. Передвижение — движение вперед без кормодобывания (включало ходьбу и бег). В этот момент животное могло пережевывать пищу, но не должно было заниматься поиском пищи. Отдыхом считали, когда животные находились в неподвижном состоянии, не добывали пищу, без жевания, не ходили и не выполняли другие активные действия (либо в положении стоя, либо в положении лежа).
Измерения собраны по 10-секундному среднему значению и стандартному отклонению данных от указанных датчиков после логарифмического преобразования: среднее значение и стандартное отклонение по осям x, y и z акселерометров и скорости движения. Затем было проведено испытание для сбора данных с электронных ошейников и c визуальными наблюдениями для определения поведенческих паттернов животных и классификации их движения. Прямые визуальные наблюдения за поведением регистрировали с помощью непрерывной выборки животных путем регистрации идентификатора животного, времени (с точностью до секунды) и вида активности в каждом случае, когда животные переходили от одного вида деятельности к другому.
Каждое поведенческое действие показывало характерную сигнатуру датчика, исходящую от датчиков движения. Средние значения акселерометра по оси x были ниже во время кормления по сравнению со значениями, когда животные пережевывали пищу в состоянии покоя, ходили или выполняли другие активные действия (например, в результате опущенного положения головы во время выпаса).
Уровень активности шеи, измеренный через SD оси х акселерометра, был самым высоким во время поиска пищи и ходьбы, средним — во время других видов активного поведения, самым низким — во время жвачки и отдыха.
Стандартное отклонение оси х акселерометра было более чувствительным при обнаружении различий между поведением по сравнению с осями y и z. Стандартное отклонение оси x смогло отделить жвачку от отдыха, а поиск пищи — от других видов активного поведения.
Ходьба была самым активным движением, промежуточными — поиск пищи и другие виды активного поведения, самыми медленными — жвачка и отдых.
Алгоритм правильно классифицировал 85,5% и 90,5% всех точек данных в наборах данных разработки и оценки соответственно. Поиск пищи показал наибольшую чувствительность (93,7% и 98,4%) и специфичность (94,6% и 99,4%), за которыми следовали размышления (чувствительность 97% и 87% и специфичность 90% и 95%) для испытаний разработки и оценки соответственно. Основные преимущества смешанных моделей включают вычислительную эффективность, подходящую для больших наборов данных (например, >2 млн строк данных), минимальные требования к обучающим наборам данных и оценку пороговых значений для отдельных животных в неизвестных и меняющихся условиях окружающей среды.
Технология и методология позволяют осуществлять автоматический мониторинг поведения в режиме реального времени с высоким пространственным и временным разрешением, что может принести пользу животноводческим предприятиям за пределами области исследований для улучшения управления животными и окружающей среды.
Коэффициенты корреляции Пирсона показали высокую зависимость стандартного отклонения измерений для всех трех осей. Так, изменчивость в большую сторону по всем трем осям обусловливается поведением животного, при котором шея и голова активно двигаются, а в меньшую — когда животные неактивны (например, как во время отдыха).
Коэффициенты корреляции от 0,6 до 0,7 были обнаружены между средней скоростью ходьбы и стандартным отклонением большинства переменных, связанных с акселерометром, в результате сильных движений шеи во всех направлениях во время движения.
Основываясь на способности акселерометра фиксировать положение головы и уровень активности, а также учитывая высокую корреляцию с другими переменными, были выбраны среднее значение и стандартное отклонение данных акселерометра по оси х, чтобы выяснить, представляют ли эти переменные разные совокупности точек данных для различного поведения.
Средняя скорость движения также была выбрана, потому что это была единственная переменная, которую можно было использовать, чтобы отличить движение вперед от всех других видов поведения.
Распределения частот трех выбранных переменных для каждого известного поведения показаны на рисунке 3.
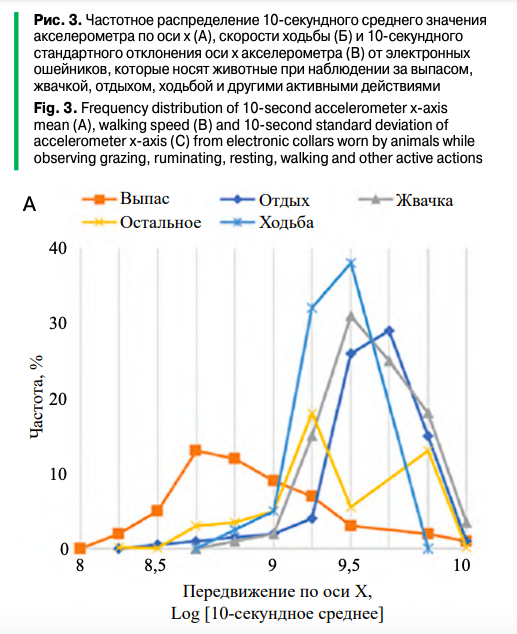
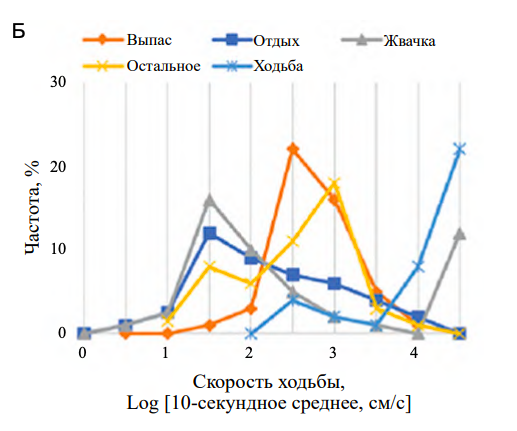
Скорость представлена в виде Log (1 + см/сек), а данные акселерометра — в виде Log (10 000 + g 104). Для 10-секундного среднего значения оси х акселерометра совокупность точек данных, соответствующих поиску пищи, хорошо отделена от остальных видов деятельности (рис. 3А). Однако между частотными распределениями других четырех исследуемых активностей существует сильное перекрытие — это указывает на то, что данные активности представляют большую проблему для разделения на основе этой переменной.
Рисунок 2А позволяет предположить, что значения чуть более 9 логарифмических единиц среднего значения данных акселерометра по оси х может быть достаточно для разделения направления головы вниз или вверх при минимизации неправильного назначения точек данных. Данные приведены в таблице 1.
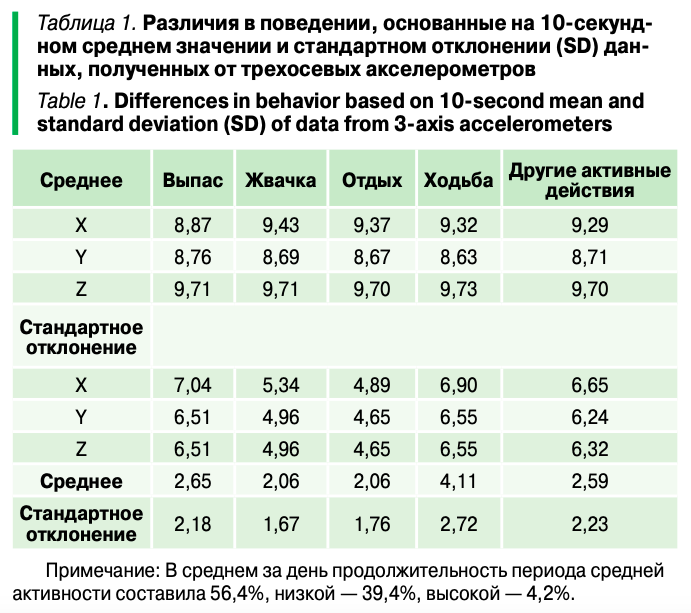
В среднем за день продолжительность периода средней активности составила 56,4%, низкой — 39,4%, высокой — 4,2%.
Выводы
Разработана методология для оценки структуры данных, полученных в электронном виде, и классификации таких данных по поведенческим действиям, включая поиск пищи, отдых, размышление, передвижение и другое активное поведение, с использованием данных датчика акселерометра болюса, закрепленного на ошейниках коров.
Испытания показали, что информация, собираемая с высокой частотой с помощью акселерометров, встроенных в ошейники для КРС, способна фиксировать мелкомасштабные пространственно-временные различия в положении и уровне активности шеи крупного рогатого скота и определять различное поведение.
Эта способность может помочь повысить точность методов классификации поведения и разработать стабильные и надежные средства для удаленного доступа к данным с ошейников в режиме реального времени для приложений виртуального ограждения и управления. Однако важно отметить, что повышенная точность достигается за счет значительного увеличения размера собираемых баз данных, что требует увеличения вычислительной мощности, а также наличия более энергоемкой батареи для обработки собранных данных.
Об авторах
Фёдор Евгеньевич Владимиров, научный сотрудник
fvladimirov21@gmail.com; https://orcid.org/0000-0003-3058-2446
Савр Олегович Базаев, кандидат сельскохозяйственных наук, научный сотрудник
sbazaeff@yandex.ru; https://orcid.org/0000-0002-2511-7526
Артём Рустамович Хакимов, младший научный сотрудник
arty.hv@gmail.com; https://orcid.org/0000-0002-4332-9274
Сергей Сергеевич Юрочка, старший научный сотрудник
yurochkasr@gmail.com; https://orcid.org/0000-0002-2511-7526
Федеральный научный агроинженерный центр ВИМ, 1-й Институтский проезд, 5, Москва, 109428, Россия
УДК 619:616-008.64+636.2.034 DOI: 10.32634/0869-8155-2024-378-1-75-80
Сельское хозяйство, ветеринария, зоотехния, агрономия, агроинженерия, пищевые технологии