Устройство автоматического контроля уровня воды для мелиоративных объектов

По данным Росводресурсов в 2021 году в Российской Федерации объем использованной свежей воды составил 48 млрд. м3, сброс загрязненных сточных вод в поверхностные объекты 11,6 млрд. м3. В общем объеме водозабора на нужды орошения и сельскохозяйственного водоснабжения приходилось 14%, в объеме загрязненных сточных вод порядка 5%. Орошаемые земли в России занимают площадь порядка 4,7 млн.га, а ирригация является одной из водоемких отраслей аграрного производства.
Учет водопотребления на нужды орошения необходим для формирования платы за оросительную воду, так как при использовании двухставочного тарифа стоимость воды зависит не только от площади орошаемого участка, но и от объема фактически поданной оросительной воды. На оросительных системах расходы воды в каналах (при подаче до 10м3/с) измеряются с помощью стандартных водомерных устройств: водосливов (треугольных, прямоугольных, трапецеидальных, с тонкой стенкой или порогом) и лотков различных модификаций (Паршала, Вентури, САНИИРИ и т.п.). При использовании большинства водомерных устройств необходимо измерение уровня воды, которое производится с помощью игольчатых и уровнемерных реек, приборов промышленного контроля (поплавковых, буйковых, акустических уровнемеров).
В отечественной практике на мелиоративных системах основным инструментом измерения уровня воды в настоящее время являются стандартные гидротехнические уровнемерные рейки, размещаемые на гидропостах в береговых успокоительных нишах (колодцах). Измерения уровня рейками является дискретным, выходная информация исключительно визуальная. Отечественные переносные водомерные рейки ГР-116 при диапазоне измерений до 1 м имеют погрешность измерений ±0,002 м. Поплавковые уровнемеры не требуют подключения к электропитанию и в диапазоне измерений до 20м обеспечивают погрешность в пределах ±0,01 м (ГР-116, РГПТ-А).
Аналоговые сигналы являются выходной информацией для ряда датчиков уровня отечественного и зарубежного производства. Российский датчик уровня QT50U требует постоянного напряжения 24 В и в диапазоне до 8 м имеет погрешность ±0,5% от измеряемой величины, такую же погрешность в диапазоне до 11 м имеет датчик IRU. Датчик Honeywell производства США требует постоянного напряжения 12 В и в диапазоне 0,5..20 м дает погрешность ±0,0001 м. Диапазон, погрешность измерений и требуемое напряжение различаются в зависимости от типа устройств.
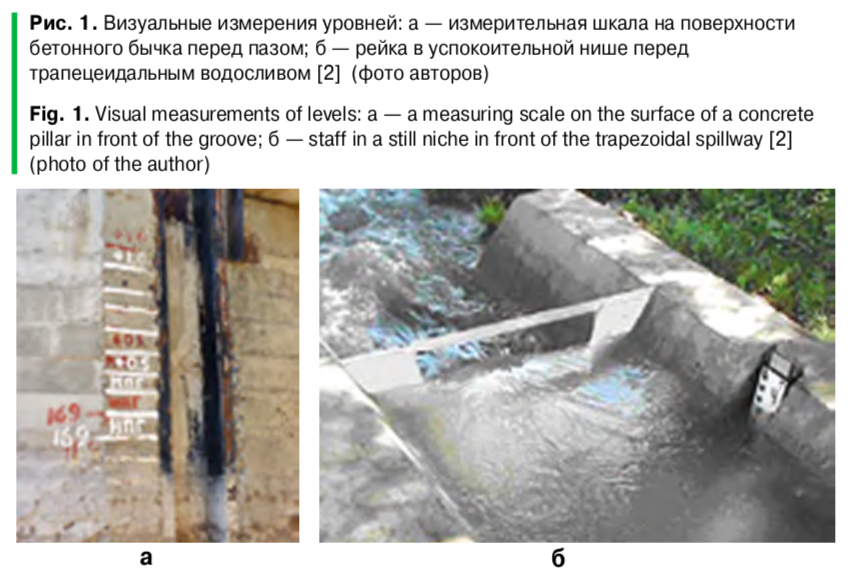
Исследования средств водоизмерения, применяемых на открытой сети государственных мелиоративных систем, выявили крайне ограниченное применение современных цифровых технологий и оборудования. Из 2181 пункта водоучета 60% использовали гидрометрические рейки, 4% уровнемеры и расходомеры, причем устаревшего образца. На старых оросительных системах контроль уровня воды зачастую происходит по меткам уровня, нанесенным непосредственно на бетонные поверхности сооружений, или выполняется по рейкам, установленным перед водомерными устройствами (рисунок 1).
Использование за рубежом автоматических уровнемеров (поплавковых, напорных, ультразвуковых, радиолокационных) конечными пользователями сдерживает высокая стоимость оборудования и проблемы обеспечения регулярного технического обслуживания.
В последнее время получили применение методы контроля уровней на основе датчиков-камер с последующей обработкой данных микроконтроллерами. Для снижения затрат разрабатываются автономные недорогие системы мониторинга. Интересной является разработка системы контроля, включающей датчик давления и регистратор данных. Испытания новых средства водоучета, использующих датчики давления и передачу данных на сервер в условиях юга России приведены в работе.
Необходимость автоматизации учета воды средствами телеметрии является одним из направлений совершенствования мелиоративных систем. Цифровизация оросительных систем – актуальная проблема современного развития мелиорации. Целью исследований является разработка комплекса автоматического измерения уровня воды на открытой мелиоративной сети и последовательное испытание экспериментального образца на водоеме (при отсутствии течения и волнообразования) и на канале действующей оросительной системы.
Материал и методы исследования
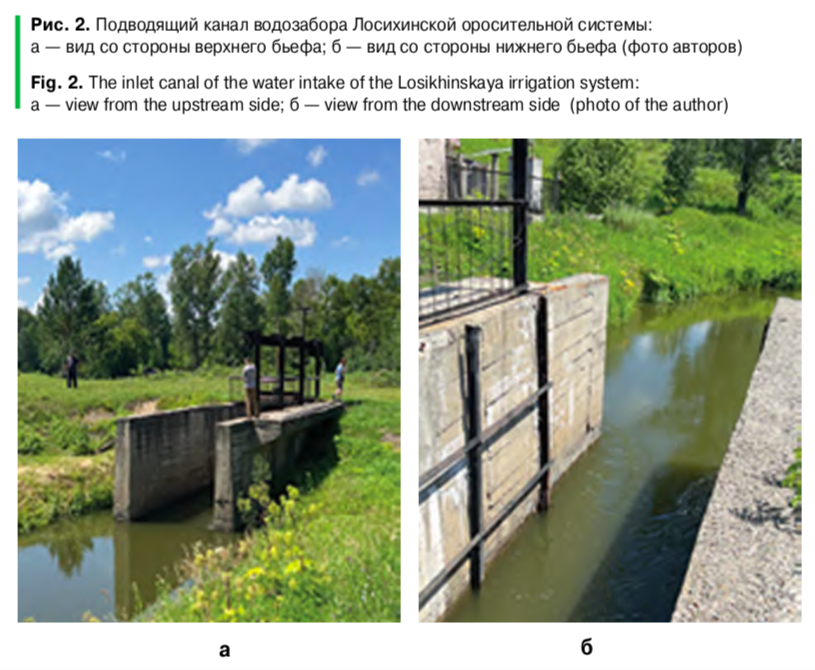
Измерительный комплекс разрабатывался для испытаний на реке Большая Лосиха Алтайского края на акватории гидроузла Лосихинской оросительной системы, расположенной в Первомайском районе. При нормальном подпорном уровне НПУ=144,4 м (балтийская система высот) объем водохранилища составляет 123 тыс.м3, при уровне мертвого объема УМО=143,6 м объем водохранилища равен 90 тыс.м3. Средняя глубина водохранилища 3,65 м. В состав гидроузла входят: бетонная водоподъемная переливная плотина, водосбросное сооружение, насосная станция, водозаборное сооружение и шлюз-регулятор. Максимальная пропускная способность шлюза-регулятора 8,6 м3/с. Береговое водозаборное сооружение, расположенное в верхнем бьефе, предназначено для забора воды на орошение и совмещено с насосной станцией. Забор воды к основным насосам осуществляется из подводящего канала по двум ниткам труб. Максимальная глубина воды в подводящем канале перед плоским затвором шлюза-регулятора составляет 1 метр, размер затвора 2х1,5м (рисунок 2).
Отводящий канал представляет собой бетонную трубу тоннельного типа размером 2х1,5м длиной 26 метров, сопряженную с водобойным колодцем и гасителем в нижнем бьефе. Все сооружения гидроузла относятся к IV (самому низкому) классу опасности, для которого установка контрольно-измерительной аппаратуры исходно не предусмотрена проектом. В настоящее время на гидроузле нет оборудования для автоматического контроля уровней воды. Служба эксплуатации фиксирует отметки уровней в створе плотины по уровнемерной рейке с последующей записью в журнале наблюдений.
Основные требования, предъявляемые к измерительному комплексу, были сформированы с учетом рекомендаций: питание от возобновляемого источника энергии (солнечных батарей) и от аккумуляторной батарей; автоматическое измерение расстояния от плоскости установки датчика до уровня воды, автоматическое измерение температуры атмосферного воздуха и атмосферного давления; передача данных на удаленный компьютер в режиме реального времени с использованием GPRS и параллельная запись в память устройства; удобный интерфейс просмотра данных.
При выборе конструктивных элементов измерительного комплекса и разработке программного кода был выполнен анализ условий эксплуатации, диапазонов и требуемой точности измеряемых величин; использованы методы теории программирования логических контроллеров, методы декомпозиции и формализации алгоритмов, структурного программирования. При испытаниях опытного образца устройства использованы методы теории планирования эксперимента, математической статистики, а также методы теории ошибок.
Оценка точности наблюдений за уровнем воды является неотъемлемой частью использования любых средств измерений. В исследовании отмечено, что систематические ошибки определения уровня воды по датчикам по результатам обследования 6 гидрометрических станций составляли от ± 0,005 м до ± 0,068 м, что привело к погрешности среднесуточного стока от 4% до 12%. Для выявления погрешностей измерений в России, Канаде, США, Франции результаты показаний датчиков сопоставляются с эталонным измерением по гидрометрическим (водомерным) рейкам.
В испытаниях основной измеряемой величиной являлось расстояние от плоскости установки датчика до уровня воды, которое необходимо сопоставить с результатами визуальных замеров по водомерным рейкам. Абсолютная погрешность на каждой проверяемой отметке вычислялась как разность между показанием датчика и соответствующим отсчетом по рейке:
За основную абсолютную погрешность принималась максимальная по модулю абсолютная погрешность. Вариация показаний, равная наибольшей абсолютной погрешности на одной и той же отметке при росте уровня воды и при его снижении не должна превышать превышала абсолютного значения основной погрешности.
Отметка установки датчика (отметка начала шкалы измерений) соответствовала нулевой отметке отсчета по водомерным рейкам. Параллельного контроля данных измерительного комплекса по температуре атмосферного воздуха и влажности воздуха в месте установки не проводилось. Впоследствии эти значения могут быть использованы для внесения к показаниям уровня корректирующих поправок, вычисляемых в зависимости от разности значений атмосферного давления, измеренного при градуировке и во время выполнения измерений. Влияние температуры на показания датчиков также может приводить к систематическим ошибкам и может быть учтено впоследствии.
Результаты и обсуждение
Экспериментальный измерительный комплекс был разработан и собран в лаборатории кафедры систем автоматизированного проектирования и инженерных расчетов РГАУ-МСХА имени К.А. Тимирязева, программирование микроконтроллеров также выполнено на базе кафедры. Основным элементом измерительного комплекса является разработанный в рамках исследований датчик, конструкция которого приведена на рисунке 3.
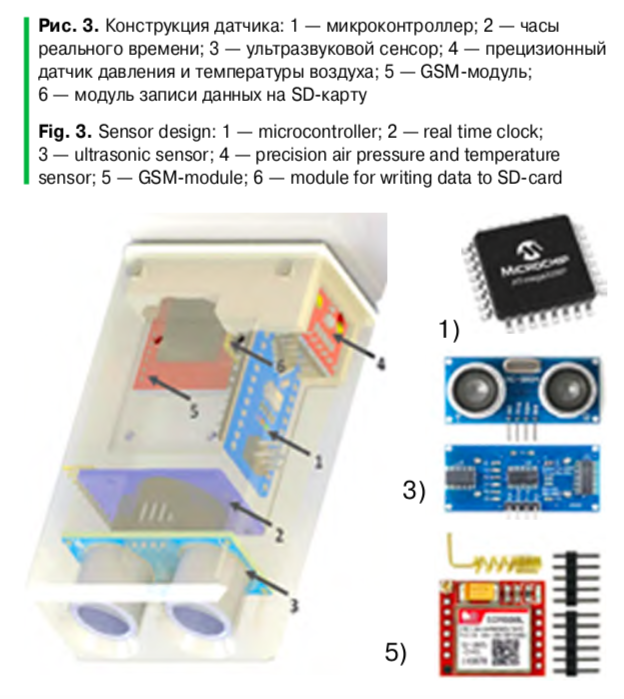
Микроконтроллер 1 предназначен для считывания данных с сенсоров и модулей, их обработки, записи на карту памяти и/или отправки по каналам сотовой связи на удаленный сервер. Для управления всеми модулями запрограммирован микроконтроллер ATmega328p. Часы реального времени 2 являются энергозависимым модулем для привязки результатов измерений к реальным временным меткам. Ультразвуковой сенсор 3 служит для приема и передачи сигналов в ультразвуковом диапазоне частот. В используемом ультразвуковом дальномере в отличие от инфракрасных датчиков измерения не искажаются от бликов или цвета (прозрачности) воды. Выбор ультразвукового датчика обусловлен его относительно низкой стоимостью по сравнению с датчиками других типов. Алгоритм получения данных следующий: на принимающий вывод датчика подается импульс длительностью 10 мс, после чего в модуле сигнал преобразуется в 8 импульсов с частотой 40 кГц, импульсы через излучатель направляются в сторону водной поверхности и после отражения будут приняты приемником как входной сигнал на выходном выводе. С помощью контроллера сигнал переводится в расстояние по формуле:
где S – расстояние до водной поверхности, м; v– скорость звука, t»340 м/с; t – время прохождения сигнала от излучателя до водной поверхности и обратно.
Прецизионный датчик атмосферного давления и температуры воздуха 4 работает в диапазоне давления от 300 до 1100 ГПа (от -500 до +9000 метров над уровнем моря), обеспечивает точность измерения давления при температуре 250С ±0,12 гПа (что эквивалентно разности высот ±1 м), абсолютная точность ±1 гПа. Диапазон измерения температур датчика лежит в пределах -40.. +850С с точностью измерений температуры ±10С.
После проведения серии измерений данные отправляются на сервер и параллельно сохраняются на карте памяти. GSM модуль 5 осуществляет передачу данных по каналу GSM или GPRS. Использование пакетной передачи данных GPRS обеспечивает более широкую зону покрытия и стабильность связи, чем технологии 3G/4G. Поскольку объем передаваемой информации достаточно мал, снижение скорости передачи данных измерений не критично. В устройстве использован модуль связи SIM800, являющийся GSM-модемом, и по возможностям не уступающий сотовому телефону при низкой стоимости и высокой энергоэффективности. Модуль записи данных на SD карту памяти 6 позволяет хранить данные на энергонезависимом носителе. Для этого использован регистратор данных на микропроцессоре ATmega328 – OpenLog, который имеет достаточно гибкие настройки и открытый исходный код, позволяющие адаптировать устройство для решаемых задач.
На рисунке 4 приведен пример размещения элементов измерительного комплекса на штанге (общий защитный корпус не показан). В состав измерительного комплекса входят датчик сбора данных 1, аккумулятор 2 и солнечная панель 3.
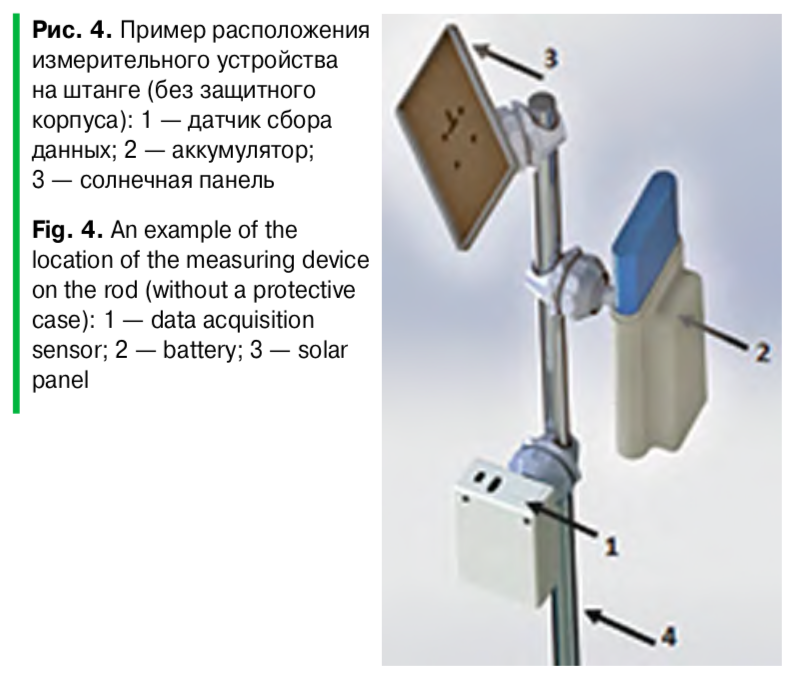
Аккумулятор позволяет накапливать избыточную энергию в период наибольшей солнечной активности и отдавать ее в период наименьшей. Использован литий-железно-фосфатный аккумулятор. Он обеспечивает стабильное напряжение заряда и имеет более длительный срок службы чем литий-ионные аккумуляторы. Солнечная панель позволяет комплексу работать автономно от внешних источников электроэнергии. Продолжительность солнечного сияния на территории Алтайского края одна из максимальных в России – более 2000 часов в год. Для региона поливной период длится в среднем 4 месяца – с 1 мая по 31 августа. Суммарная солнечная радиация в этот период максимальна, что делает оправданным использование солнечных панелей в качестве альтернативного источника энергии.
Все корпуса элементов измерительного комплекса напечатаны в лаборатории на 3D принтере. Корпус основного датчика сбора данных – на высокоточном полимерном принтере, корпуса менее требовательных элементов – на FDM принтере конструкционным ABS пластиком. Разработка корпусов производилась в программном комплексе SolidWorks. Габаритные размеры всего измерительного комплекса 0,2х0,5х0,5 м, габаритные размеры основного датчика 1 0,1х0,06х0,02 м.
Волнение поверхности в створе измерения уровня может негативно сказываться на точности измерений. В отечественной и зарубежной практике при амплитуде колебаний уровня воды более 0,05 м на водомерных постах обязательна установка успокоительных устройств, которые уменьшают высокочастотные колебания уровня воды. Известны разработки автоматических пневматических уровнемеров, использующих аналоговые фильтры нижних частот «бегущей волны», которые отфильтровывают шумы от ветровых волн и зыби на воде [13]. Для установки этого уровнемера не требуется устройство успокоительного колодца, но ошибки измерений минимизируются.
На подводящем канале водозабора Лосихинской оросительной системы успокоительная ниша/колодец не предусмотрены, так как проект не предполагал автоматической регистрации уровней воды. Для устранения возможных колебаний измеряемых уровней при их фиксации измерительным устройством предусмотрено последовательное использование двух фильтров данных – медианного фильтра третьего порядка и рекурсивного фильтра скользящего среднего. Алгоритм применения фильтров следующий: выполняется 10 мгновенных замеров, которые фильтруются и дают усредненное значение уровня. Затем в течение одной минуты операция повторяется 20 раз для получения среднеквадратического отклонения.
Тестирование экспериментального образца измерительного комплекса выполнено в безветренную погоду на Среднем Фермском пруду кампуса РГАУ-МСХА имени К.А. Тимирязева (рисунок 5 а). Во время испытаний для снижения веса устройства солнечные батареи не использовались, энергоснабжение происходило от аккумуляторной батареи.
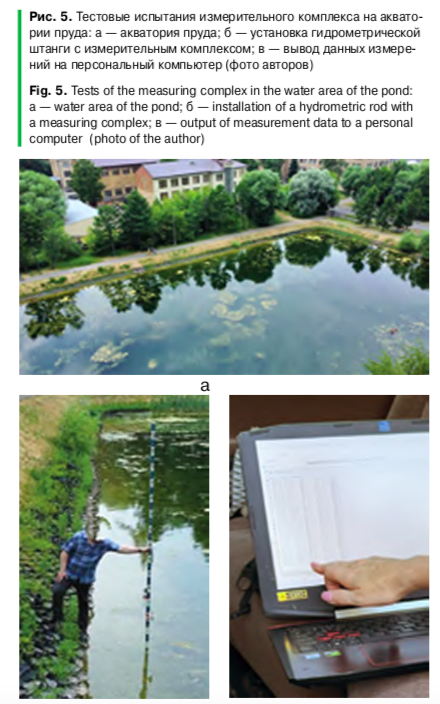
В каждой серии опытов изменялась высота крепления измерительного комплекса на гидрометрической штанге: 0.9 м, 1.2 м, 1.5 м, 2.0 м. Штанга устанавливалась в прибрежной зоне на глубине 0,5 м (рисунок 5 б). Положение штанги контролировалось пузырьковым уровнем. Для каждого высотного положения устройства производились ежеминутные измерения расстояния до водной поверхности датчиком с выводом информации на компьютер (рисунок 5 в). Параллельно с интервалом в 3 минуты измерения делали водомерной рейкой ГР-104 с погрешностью отсчета ±0,01 м. Уровень воды в месте установки штанги во время эксперимента практически не изменялся. Каждая серия включала 5 замеров с интервалом 3 минуты (всего 20 дискретных измерений). Данные замеров по рейке вносились в журнал наблюдений с указанием времени замеров.
Выбор гидрометрического створа для установки экспериментального образца измерительного комплекса на подводящем канале Лосихинского гидроузла соответствовал рекомендациям для гидропостов. При расходе подводящего канала до 10 м3/с длина прямолинейного участка канала в 4 раза превышала его ширину, т.е. составляла более 8 метров. Комплекс был жестко закреплен на металлическом профиле внутри прямоугольного бетонного участка вне зон влияния плоского затвора и входа (рисунок 6). Погодные условия позволили избежать монтажа общего защитного корпуса, что снизило вес устройства до 1,6 кг. На рисунке 6 приведен фрагмент проведения испытаний.
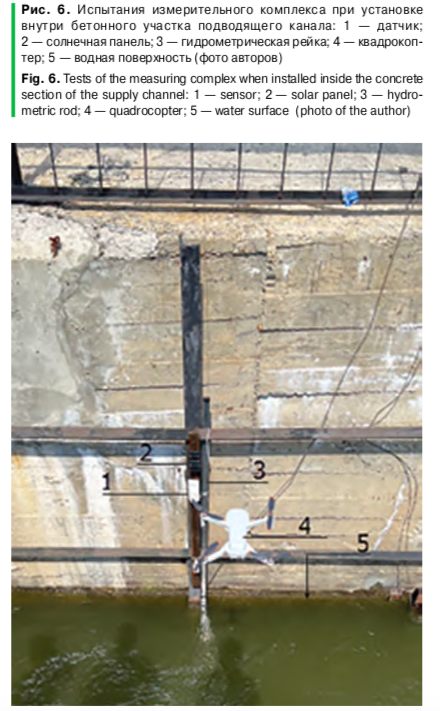
Датчик 1, установленный на расстоянии 0,5 м от водной поверхности, получал питание от солнечной батареи 2 и передавал информацию на компьютер через равные интервалы времени (1 минуту). Гидрометрическая рейка ГР-104 (3), с погрешностью отсчета ±0,01 м служила для визуального контроля уровня 5. Для удобства снятия показаний по рейке с учетом требований техники безопасности использовался квадрокоптер 4 с видеокамерой. Измерение уровня воды с помощью видеокамеры и стандартных двухцветных рейкомеров изложено в работе. Мониторинг уровня воды при автоматическом обнаружении видеокамерой рейки и считывания ее показаний приведен в исследованиях.
Время непрерывной работы экспериментального образца измерительного комплекса на подводящем канале составило 100 часов, данные измерений представлены листингом значений с временными метками (интервал между измерениями 1 минута). Контрольные замеры по рейке проводились в светлое время суток с интервалом между измерениями 1 час, данные визуального контроля состояли из 60 дискретных измерений, внесенных в журнал измерений с соответствующими временными метками.
Сравнение результатов измерений по водомерной рейке и данных измерений, полученных с помощью комплекса, выполнено для испытаний на акватории водоема и на подводящем канале. Данные листинга сопоставлялись с данными журнала измерений для одинаковых временных меток. При работе измерительного комплекса на акватории пруда с практически гладкой поверхностью воды основная абсолютная погрешность составила 0,01 м. Выраженной динамики уровня воды на акватории пруда во время измерений не было.
При работе измерительного комплекса на подводящем канале уровень воды за 100 часов наблюдений имел максимальное снижение на 0,36 м, затем рост на 0,36 м по отношению к нулевой отметке отсчета по рейке. Основная абсолютная погрешность равна 0,02 м. Вариация показаний, равная наибольшей абсолютной погрешности на одной и той же отметке при росте уровня воды и при его снижении была меньше абсолютного значения основной погрешности.
Для сравнения: акустический датчик уровня «Kalesto» (Германия) имеет диапазон измерений 0.5..30.0 м, погрешность ±0.01 м и работает при постоянном напряжении 12В.
Технические возможности комплекса позволяют измерять уровни в интервале от 0.2 до 4.0 м. Целью дальнейших исследований являются испытания комплекса при установке на высоте более 2 метров над уровнем воды, оценка точности измерений и разработка компьютерной программы, обеспечивающей удобный интерфейс контроля за уровневым режимом открытой мелиоративной сети.
Выводы
Разработанный экспериментальный образец цифрового измерительного комплекса способен в автоматическом режиме производить ежеминутные измерения температуры атмосферного воздуха, атмосферного давления и расстояния до уровня свободной поверхности воды с записью в память устройства и/или передачей на удаленный сервер. Габаритные размеры комплекса 0.2х0.5х0.5 м, вес вместе с защитным корпусом 2 кг. Для работы комплекса требуется постоянное напряжение 5В, питание возможно от солнечной батареи и/или от литий-железно-фосфатного аккумулятора.
Точность измерения атмосферного давления при температуре 250С составляет ±0,12 гПа. Точность измерения температуры атмосферного воздуха ±10С, диапазон измерения лежит в пределах -40.. +850С.
Испытания автоматического комплекса в водоеме при отсутствии выраженного течения и в канале с максимальной скоростью течения порядка 2,6 м/с продемонстрировали удовлетворительную точность измерений. В испытаниях при высоте установки от 0.4 до 2.0 м над статичным уровнем воды основная абсолютная погрешность составила 0.01 м. При наличии волновых явлений основная абсолютная погрешность составила 0.02 м. Для повышения точности измерений на мелиоративных каналах комплекс можно размещать в нишах или успокоительных колодцах.
Об авторах
Вера Леонидовна Снежко, профессор, заведующая кафедрой, Российский государственный аграрный университет — Московская сельскохозяйственная академия им. К.А. Тимирязева, ул. Тимирязевская, 49, г. Москва, 127434, Российская Федерация
E-mail: vlsnejko@rgau-msha.ru https://orcid.org/0000-0002-3968-0563
Дмитрий Михайлович Бенин, доцент, Российский государственный аграрный университет — Московская сельскохозяйственная академия им. К.А. Тимирязева, ул. Тимирязевская, 49, г. Москва, 127434, Российская Федерация
E-mail: dbenin@rgau-msha.ru https://orcid.org/0000-0003-1265-4071
Александр Викторович Подобный, преподаватель, Российский государственный аграрный университет — Московская сельскохозяйственная академия им. К.А. Тимирязева, ул. Тимирязевская, 49, г. Москва, 127434, Российская Федерация
E-mail: a.podobnyi@rgau-msha.ru https://orcid.org/0000-0001-5887-1253
Гавриловская Надежда Владимировна, доцент, Российский государственный аграрный университет — Московская сельскохозяйственная академия им. К.А. Тими- рязева, ул. Тимирязевская, 49, г. Москва, 127434, Российская Федерация
E-mail: gavrilovskayanv@rgau-msha.ru https://orcid.org/0000-0001-5060-7837
УДК 631.672.4: 621.3.087.47: 681.586.48 DOI: 10.32634/0869-8155-2023-366-1-83-89
Сельское хозяйство, ветеринария, зоотехния, агрономия, агроинженерия, пищевые технологии